These are the researches that we have done in the past. Clicking the images below will show you more information about the research.



Material Design of Shape Memory Ceramics
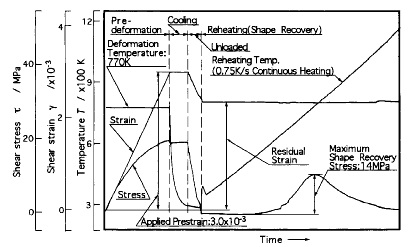
By the result of examining the shape recovery properties of the ceramic, we have shown the design guide of material design by revealing the mechanism of the shape memorizing phenomenon and the mechanism of the large recovery. The shape memorizing phenomenon of ceramics occurs when the firm phase of the material that softens earlier than others in high temperature range are constrained and released due to the viscosity of the soft phase of the material. For example, the glass phase in the glass ceramics or the grain boundaries in the sintered ceramics are ones of the materials. To obtain a large recovery, it is important to construct the network that linked together to each other like mesh by the crystals of the hard phase. By crystal network modifying as a mechanical spring as a whole, high compliance modification and high recovery is possible. By improving the micro-spring constituted of the crystal, creating a shape-memory ceramics with a recovery amount up to several 100%, which is well over 2% of mica glass-ceramics, can be expected.
形状回復力測定実験の一例 マイカ・ガラスセラミックスの組織
>>Go to the top of the page
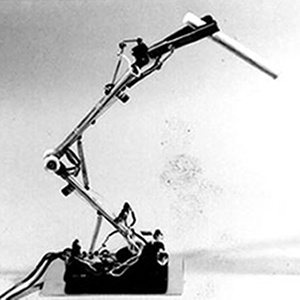
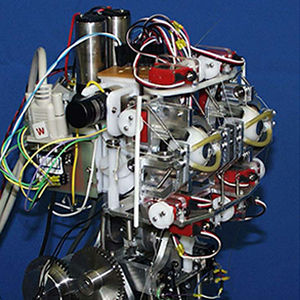
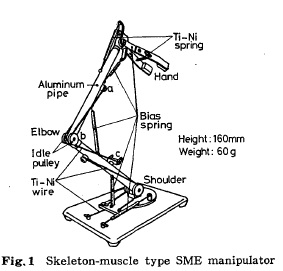
Manipulator Using Shape Memory Alloy
When using shape memorizing alloy, the mechanism or structure of the machinery and equipment can be simpler, smaller, and lighter compared to conventional ones. Its application development research has been noted on a number of fronts. We regarded the shape memory alloy as converter between thermal energy and mechanical energy. Doing so, we have developed a shape memory effect digital servo actuator of microcomputer control by examining the static and dynamic of input and output characteristic when Ti-Ni alloy was pulse electro heated and contriving the input and output control system.

>>Go to the top of the page
Communication of Plant
It has been known that plants sense the surrounding environment of its own and grow autonomously according to the situation. But unlike human, plants do not have highly differentiated organ, such as brain, nerves, or sensory organs, so the information system is completely different. Therefore, we have studied the mutual communication of plants by measuring biopotential among group of trees in the field and communication among radicles by electric field measurement system.
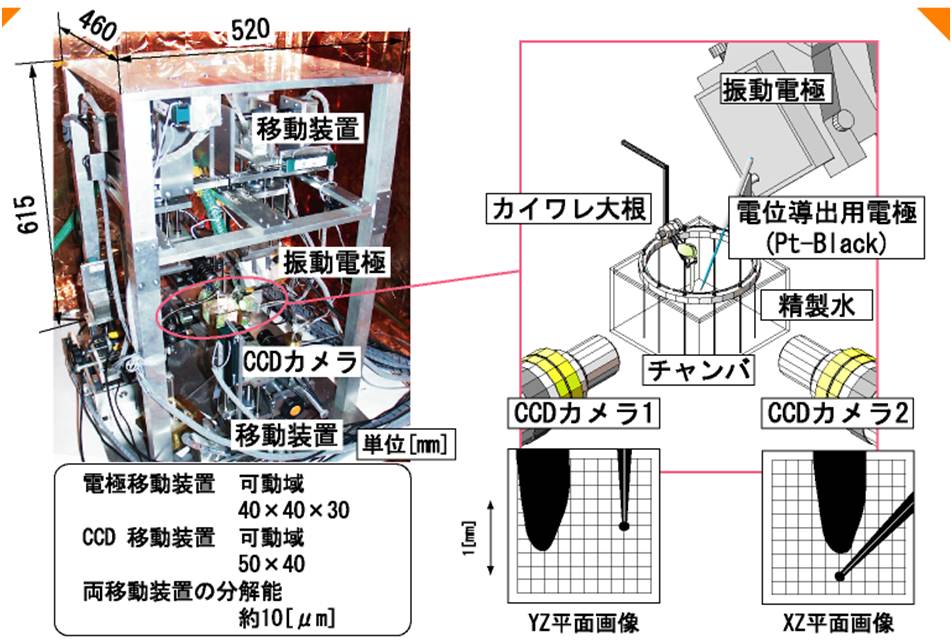
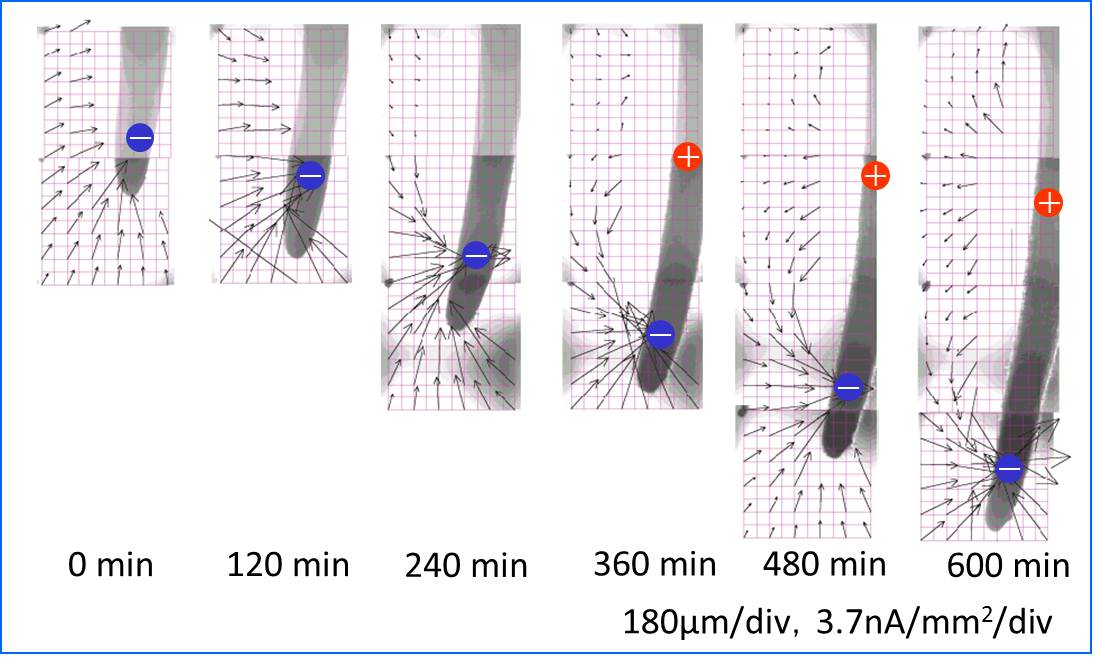
幼根の電場計測システム 幼根が創る電場パターンと生長の関係
>>Go to the top of the page
CO2 Absorption Capacity Real-time Display System of the Plant
In this research, as a method of experiencing the CO2 absorption capacity of a familiar plant, we developed an exhibition system for displaying measured CO2 concentration change of a variety of plants in real-time. The system measures the CO2 concentration change in the sealed chamber with stem in it in real-time and displays the graph. To be able to examine the activity of the plants by brightness, the halogen lights are set around the chamber and can be turned on and off with the switch. In addition, it is able to let plants absorb the CO2 contained in the breath of the participant by placing handset to exhale in the chamber. Through these, it is now possible to experience CO2 absorption of plant as behavioral acts. This system was exhibited on the Aichi Expo and got the good evaluation. We are planning to develop into educational field.

植物のCO2吸収リアルタイムディスプレイ
>>Go to the top of the page
Climbing Robot
In Japan, left of the plantation and devastation due to the decrease of forestry workers are now one of major problems. In order to improve this situation, we are developing a climbing robot which support the forest work such as thinning and pruning. This robot is made by combining the arm mechanism to the conventional climbing mechanism of yellowtail rope system to be able to avoid the branches. This mechanism allows the robot to climb variety of trees. We have tested this machine out with pruning module equipped and concluded effective to support of forest work. This robot was exhibited and done demonstration at the NEDO prototype in Aichi Expo.

>>Go to the top of the page
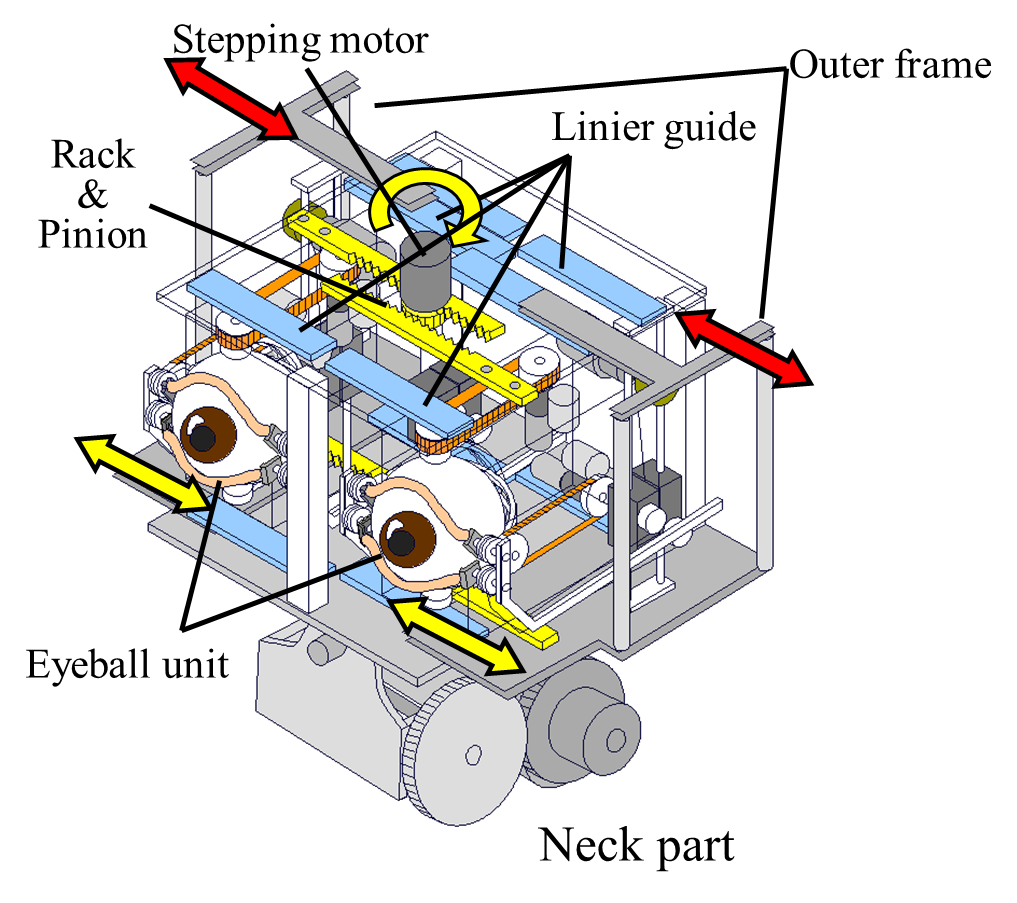
Eyeball Robot
When communicating between distances with robot as an actual media, we have focused on movement of eyes. The movement of eyes such as gazing, shifting, or blinking is one of the most important parts of physical movement. We have developed the eyeball robot to examine the effect to communication.
>>Go to the top of the page
Kagemaru ~ Mobile Shadow Image Projection Robot
We have developed mobile robot “Kagemaru” which is able to project shadow to various places. This robot performed a dance at the live performance with the group called “Minna no Dance Field”.

>>Go to the top of the page
Swivel Chair Communication System
Due to development of information technology, it is easy to exchange information. However, there are not enough researches on media or communication that can create the feeling of identification or sense of security. Therefore, the technology to support the sense of connection or close watch against family in distance is expected. In this study, we have developed a rotating chair communication system that can share the movement of the entire body. This system is based on the method to enhance the feeling of being together by interacting with the entity between distances. By comparing the ways to move the remote chair with hands or the movement of chair, the latter one had stronger physical connection to an opponent.

>>Go to the top of the page
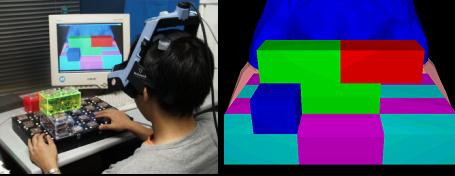
Building Block Interface
In order to create a place of communication between distances, we focused on building blocks that each person gradually but freely constructs objects. Playing with public sandbox or building blocks is one of the techniques to learn sociality in childhood. At the same time, there is a possibility for these to be adopted as a communication tool between generations or cultures. Therefore, we developed a behavioral interface based on the technique of sharing the space in distances by producing a model of blocks in shared virtual space. As a result, we have shown that this interface can support cooperative work of each other by creating a new field while constantly maintaining connection with the entity.
>>Go to the top of the page
Synchronous Movement Table
To create a sense of security and confidence, it is said that it is necessary to meet face to face. This is one of big problems in using computer media technologies as support of communication. Therefore, we aim to support the creation of the sense of being in the same space in distances, co-presence, and we have devised the double presentation technique of the physical act which connects the common video space to the entity space. With this technique, we have developed a shared table space system that can strengthen the feeling of being together by moving the entity of other side as if sitting around the same table.
>>Go to the top of the page
In this study, we are researching for the communication method which is done by people writing in the air with their bodies using the space as the media for communication. We have developed a cooperative drawing system which enables 2~3 people to draw in the same space with different viewpoints in the real world with a virtual line, and share the visual images. We also developed a function where the virtual lines could be manipulated with the hands and a function for gaining the drawing material from the real view with the hands, to realize the spatial expression that is made from the view and the lines, not to separate the real and virtual lines, by thinking about the interface that keeps consistency of the bodily actions made in each spaces.

>>Go to the top of the page
The Physicality Extension Scheme for a Virtual Tool and its Evaluation
We are researching about the relationship between the body and the virtual tools. To do so, we made the grip that is connected to three-dimensional virtual stick, and we examined by drawing shadows or adding chaotic and entrainment. Also, we have done experiment focused on the integration of tactile virtual space near the body as one of the methods to examine the relationship between the body and the virtual tools.
>>Go to the top of the page
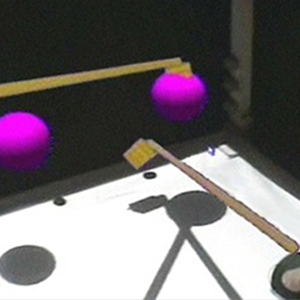
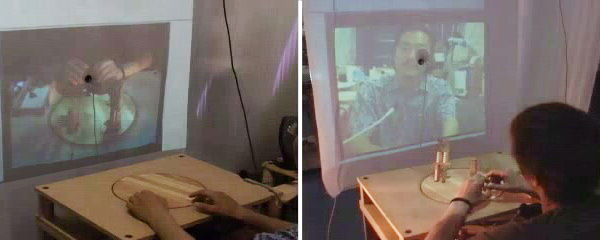
Embodiment Expansion Face to Face Communication System
In this study, we are researching for the method for connecting remote spaces, for support for giving three dimensional instructions without the limitation of space, by the usage of tools in their spaces. To be more specific, we developed a system that is made from a face to face type display that has a special feature in the positioning of the camera and the screen, and a virtual tool interface that is projected onto the real tool that a person uses. From the expression made from the virtual shadow, we found that the feeling of wrongness with the geometric separation of the real tool and the virtual tool that is projected on the table decreases, and the possibility of connection between virtual tool interface and the user’s body strengthens.
>>Go to the top of the page