


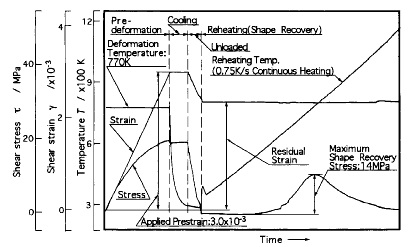
形状記憶セラミックスの材料設計について
セラミックスの形状回復特性を調べた結果により,セラミックスの形状記憶現象発現のメカニズムと,大回復量を得るためのメカニズムを明らかにし,形状記憶セラミックスを材料設計する際の設計指針を示した.両メカニズムをようやくすると,以下のようになる. (1)セラミックスの形状記憶現象は,ガラスセラミックスにおけるガラス相,焼結セラミックスにおける粒界のように,高温域で他よりも先に軟化する箇所を持つ材料において,その軟相の粘性変化により,硬相の弾性変形を拘束・開放することにより発現する. (2)大きな回復量を得るには,硬相としての結晶によって,互いに連結しあった網目状のネットワーク組織を構築することが重要である.結晶ネットワークが全体として機械的なバネのように変形することにより,高コンプライアンス変形・大回復量が可能となる.結晶により構成されるマイクロバネを改善することにより,マイカ・ガラスセラミックスの2%をはるかに超える数100%に及ぶ回復量を持つ形状記憶セラミックスの創製が期待できる.
形状回復力測定実験の一例 マイカ・ガラスセラミックスの組織
>>このページのトップに戻る
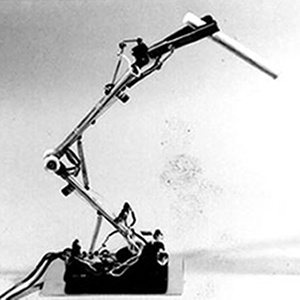
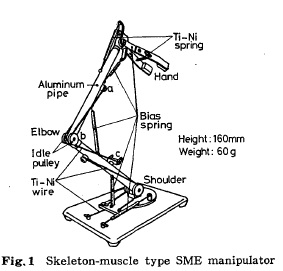
形状記憶合金を用いたマニピュレータ
金属合金の形状記憶効果を利用すると,従来の機械機器の構造,機構を大幅に簡単かかつ小型軽量化できるため,その応用開発研究が,多方面にわたって注目されている.著者らは,形状記憶合金が熱→機械的エネルギー変換機能素子であるとみなし,Ti‐Ni(約50-50)合金をパルス通電加熱した時の静的および動的な入出力特性を調べるとともに,その入出力盛業システムを考案し,マイコン制御の形状記憶効果デジタルサーボアクチュエータを開発した.

>>このページのトップに戻る
植物のコミュニケーション
植物は自身の周辺環境を感知し,状況に応じて自立的に生長することが知られています.しかし植物は人間のように脳・神経・感覚器官など高度に分化した器官を持たないので,その情報システムは動物のものとは全く異なります.そこでフィールドにおける樹木群の生体電位計測,および幼根を対象とした電場計測システムによる個体間コミュニケーションの計測等を行い植物相互のコミュニケーションについて研究しました.
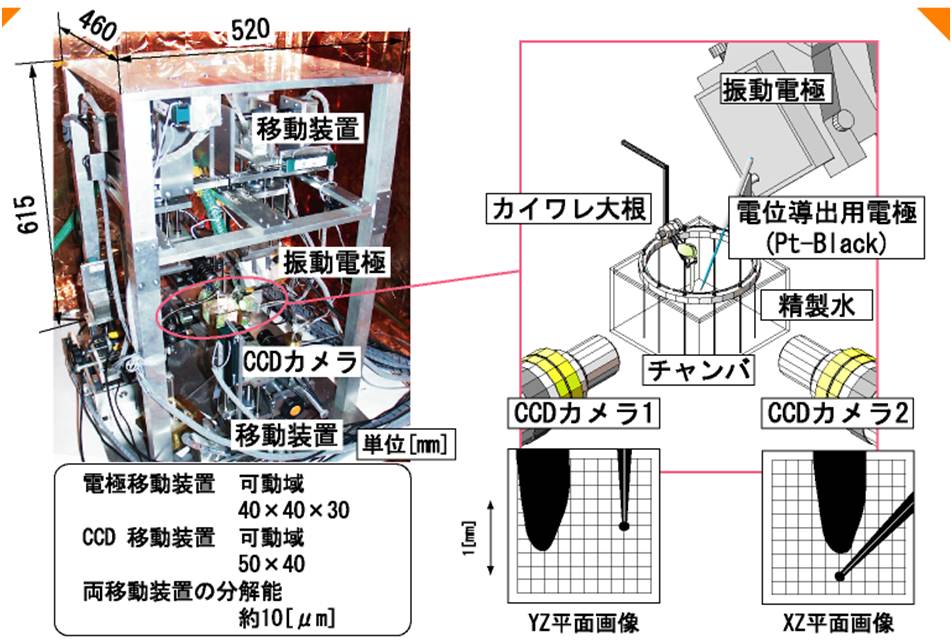
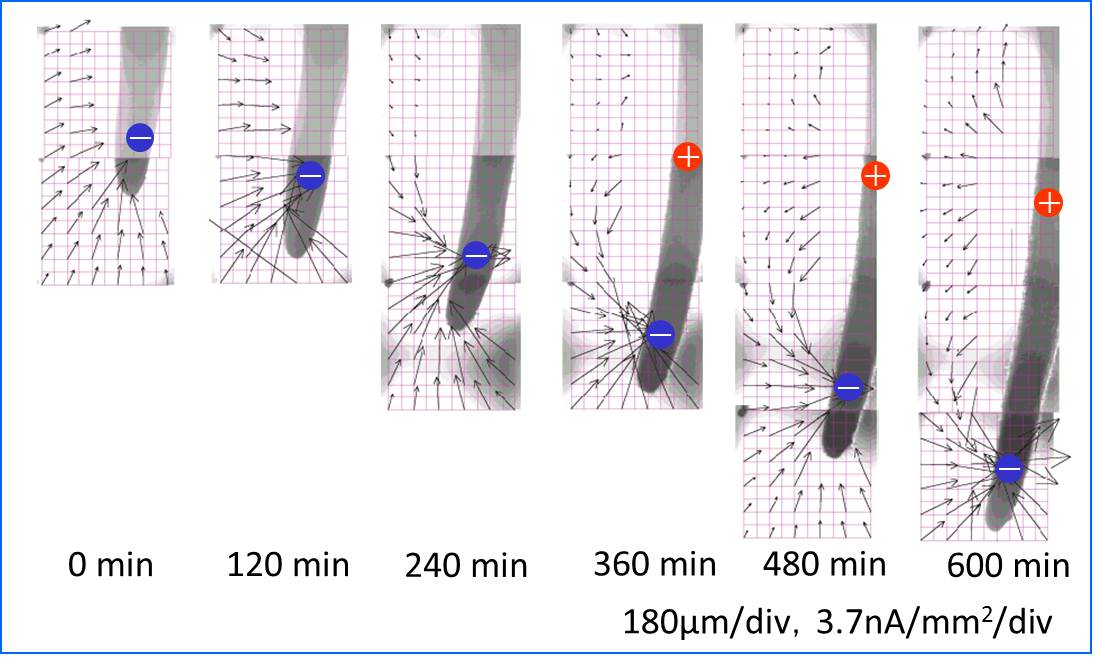
幼根の電場計測システム 幼根が創る電場パターンと生長の関係
>>このページのトップに戻る
植物のCO2吸収能リアルタイム展示システム
本研究では身近な植物のCO2吸収能を実感してもらう手法として, 様々な植物によるCO2濃度変化をリアルタイムで計測・表示する展示システムを開発しました. システムでは植物の樹幹部が入った密閉チャンバ内のCO2濃度変化をリアルタイム計測し,モニタにグラフ表示します. このとき観察者が明るさによる植物の活動の違いをその場で調べられるよう,チャンバ周辺に設置したハロゲンライトを, スイッチでON/OFFできるようになっています.さらに,観察者の吐息に含まれるCO2を受話器を通してチャンバ内に入れられるようにすることで, 自分の吐息に含まれるCO2を植物に吸収させることができます.これらにより,植物が持つCO2吸収の働きを行為的,体験的に捉えることが可能になりました. このシステムは愛知万博で展示実験を行い,高い評価を得,今後は教育現場などへの展開を予定しています.

植物のCO2吸収リアルタイムディスプレイ
>>このページのトップに戻る
木登りロボット
わが国では林業従事者の減少による人工林の放置,荒廃が 大きな問題となっています.この状況を改善するため我々は,枝打ちや間伐といった森林 作業を支援する木登りロボットの開発を行っています.本ロボットはこれまで開発されてきたぶり縄方式の木登り機構に独自 なアーム把持機構を組み合わせることで枝を回避し,様々な樹木に対応することが可能となりました. 本ロボットに枝打ち等の作業モジュールを搭載することで森林作業支援への有効性を確認しました. なお,本ロボットは愛知万博のNEDOプロトタイプ ロボット展で展示,実演を行いました.

>>このページのトップに戻る
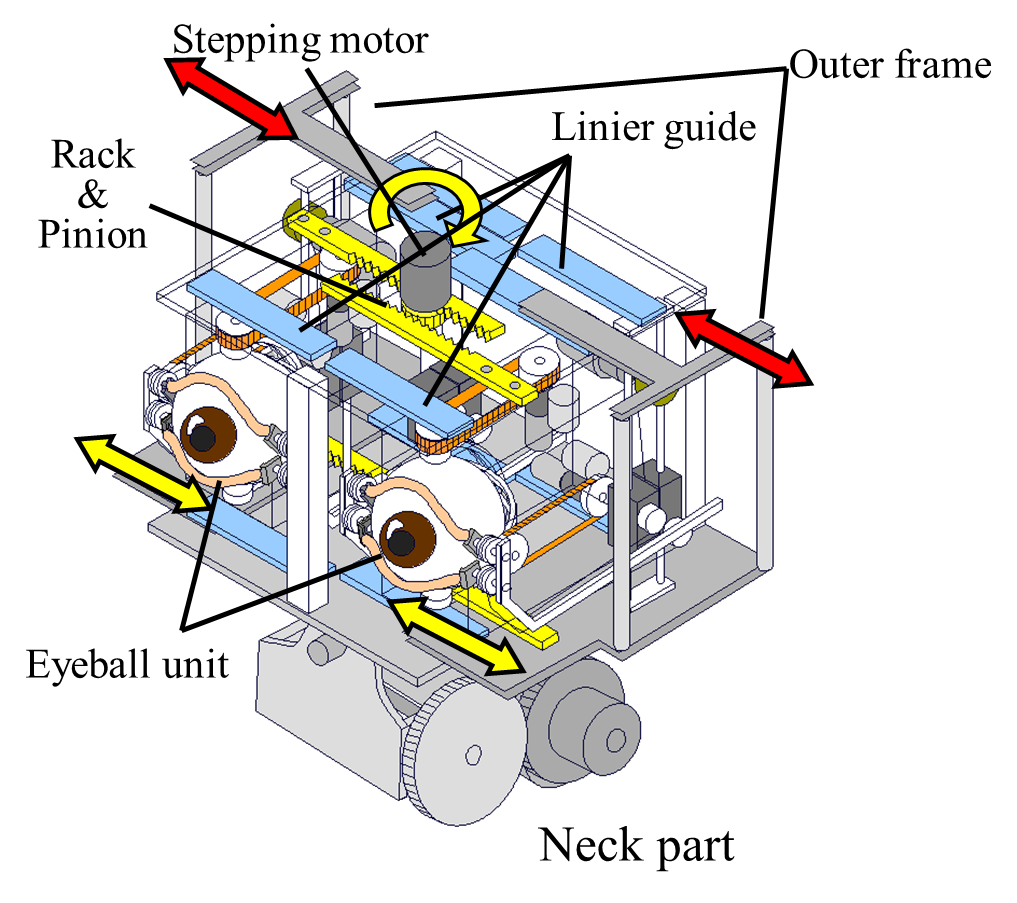
目玉ロボット
遠隔地間でのコミュニケーションにロボットを実在的なメディアとして利用するという考えの基に,身体的な行為のなかでとくに重要な働きを担っているといわれる視線や,頷き,瞬きなどに着目した目玉ロボットを開発し,それらを介したコミュニケーションの有用性について検討しました.
>>このページのトップに戻る
影丸~移動型影映像投影ロボット~
様々な場所に影を投影することが可能な移動型ロボット 「影丸」を開発し,ライブパフォーマンス(みんなのダンスフィールド)において,ロボットと影によるダンスパフォ ーマンスを行いました

>>このページのトップに戻る
回転椅子コミュニケーションシステム
情報技術の発達に伴い,離れた人と人との間で情報を送信し合うことがたやすくなったものの,相手との一体感や安心感を創出できるようなメディア・コミュニケーションに関する研究は必ずしも充分に行われていない.このような状況において,離れた家族とのつながりやみまもりの感覚などを支援する技術が期待されている.本研究では,これまでに本研究室で考案された,遠隔地間で実体とのインタラクションを共有することによって相手と共に居合わせる感覚を強める手法に基づき,身体全体の動きを共有することが可能な回転椅子コミュニケーションシステムを開発した.手で操作するディスクの動きと,椅子に座って操作する椅子の動きとを,遠隔の相手の椅子の動きとしてそれぞれ表現する方法において比較実験したところ,後者の表現の方が相手との身体的つながり感が強まるとの結果が示唆された.

>>このページのトップに戻る
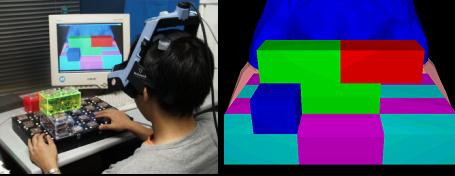
積み木インタフェース
異なる現場をつなげ,コミュニケーションの場を創るために,互いがオブジェクトを空間的に自由に構成していく積み木遊びに着目した.集団における積み木遊びや砂場遊びは幼児期において社会性を身につけさせる手法であるとともに,世代間,異文化間のコミュニケーションツールとしても適応できる可能性もある.そこで,実体の積み木を使った造形行為を共有仮想空間に再現し,その仮想空間を介して離れた現場間で互いが場を共有する手法に基づく,行為的インタフェースを開発した. これにより,実体のつながりを仮想空間と整合的に維持しながら新たな現場を創出し,互いの共同作業を支援できることを示した.
>>このページのトップに戻る
同期運動テーブル
互いの間における信頼感や安心感の創出には,人と人が直接出会わないとうまくいかないことが指摘されており,このことがコミュニティ支援にコンピュータメディア技術を活用する際の大きな問題にもなっている.そこで著者らは,遠隔地間において互いが相手と同じ空間にいるという感覚(共存在感)の創出支援を目指し,共通の映像空間と自分が実在する場所をつなげる身体行為の二重的表現手法をこれまでに考案した.この手法に基づき,あたかも1つのテーブルを囲んでいるかのように,相手側の実体を移動させたり,相手と同じ場所にいるかのような感覚を強めたりしあうことが可能な空間共有テーブルシステムを開発した.
>>このページのトップに戻る
描画表現に着目し,複数人が空中に身体を使って直接描画しあうことで空間そのものをメディアとして情報を伝え合うコミュニケーション手法について研究しています. 本研究において2,3人の描画者が同時に実空間上に重畳された仮想的な描線を異なる視点から見ながら,協調して描画しあうことの可能な共同描画システムを開発しました.また実空間と仮想的な描線とを分離せず,風景と描線とを統合した空間表現を実現するため,それぞれの空間における身体行為の整合性を考慮したインタフェースを考案し,直接手を使って風景から描画素材を取得したり,仮想的な描線を手を使って直接操作することを実現しました.

>>このページのトップに戻る
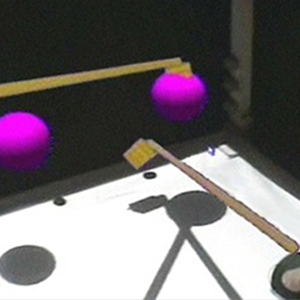
仮想道具における身体性拡張手法とその評価
把持したグリップにVirtualな棒を長手方向に3次元的に接続した仮想道具において,影を付与したり,Virtualな棒の挙動に身体の動きに対するカオス性や引き込みモデルなどを実装したりすることで,身体と仮想道具の間にどのような関係が発現するかを調べています.また,身体と仮想道具の関係を調べる手法の一つとして,身体近傍空間に視触覚の統合に着目した実験(Cross-modal Congruency task)などをこれまでに行っています.
>>このページのトップに戻る
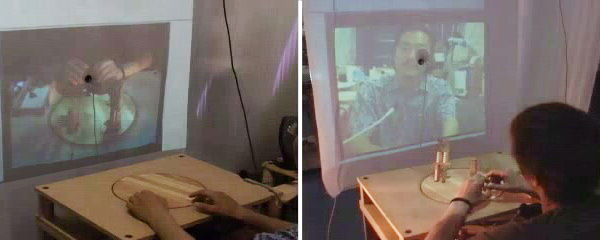
身体性拡張対面コミュニケーションシステム
遠隔の異なる空間を双方で接続し,3次元的な指示行為を支援するために,空間を制約するのではなく,互いの空間で自由に操作可能な道具を利用する手法について研究しています.具体的にはカメラとスクリーンの配置に工夫を施した対面型のディスプレイと,把持した実体の道具に映像の道具を投影する仮想道具インタフェースからなるシステムを開発しました. そして仮想的な影を用いた表現により,実体の道具とテーブル上に投影される映像の道具との幾何的な分離に対する違和感を減少するだけでなく,仮想道具インタフェースと操作者の身体とのつながりが強まる可能性も見出しました.
>>このページのトップに戻る