The Measurement and Support for the Co-creative Expression in a Hand-contact Improvisation
Development of the Hand-contact Improvisation Machine
There are times where there is a feeling of inseparable connection between self and others when each other’s connection is being deepened and the body and mind are in a synchronism, like the feeling of embracing others while being embraced, and being embraced while embracing, in an embodied improvisation with direct contact with the body of the others and self, liken in a inclusive dance. This sense of feeling is called sympathetic embodied awareness, and there are times when this sympathetic embodied awareness appears in an exchange of force through the back and forth motion of the hands in a hand-contact improvisation, which is an improvisational embodied expression with the direct contact of the hand with others.
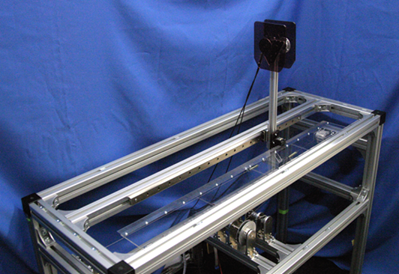
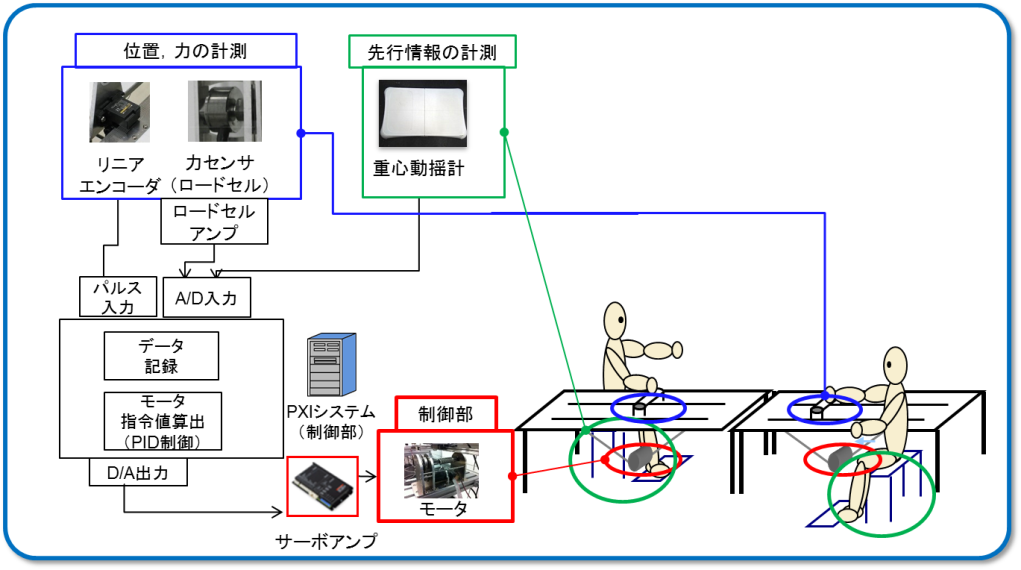
In this research, we have focused on the measurement of the activeness and the passiveness that are thought to be changing dynamically through the exchange of forces in a hand-contact improvisation. To objectively measure these, we measured the exchange of force, such as the counterforce that comes back to the hand and the movement of the body, to analyse the dynamics of sympathetic embodied awareness. The real hand-contact improvisation is done by moving around freely in a three-dimensional space, and the measurements are complex. So by limiting the degree of freedom to a single degree of freedom, like in the figure shown, we have aimed to simplify the machine and the measurements. The machine in the picture has a board, which is connected to the linear rail guides that enable single degree of freedom movement, with a band to fix the hand to the board to enable the pushing and pulling movement of the hand. With this machine we are measuring the force on the board with a force sensor, and the position of the board on the linear rail guide with the position sensor. We also measured the center of floor reaction force as the physical information of the body in an expressive movement by placing load cells on the seat. By doing a hand-contact improvisation with the machine, we have found that when the sympathetic embodied awareness is coming forth, the movement of the center of floor reaction force from the body comes before the hand movement, and this happens more to both of the people doing the hand-contact improvisation. From this finding, we are thinking of capturing the special features of bodily movement, which can be seen when people are co-creating expressions together in a hand-contact improvisation, with the machine that we have developed.

Development of the Machine to Support Hand-contact Improvisation in Remote Locations
With the IT technologies coming into our living space these years, the interfaces that we use now is mostly controlled by a button, or a on/off just like in our cellphones and computers. From this kind of interface, by symbolising the information, we were able to communicate with a direct things to others, but it made it harder to find out the appropriate expression to use from the other’s situation, and to communicate with feelings, which may end up in troubles from miscommunication.
So in this research, we focused on the improvisational embodied expression like the hand-contact improvisations. We have done researches to face this problem by enabling the occurrence of the process of generating deep connections with others by moving the body in remote locations. In this study, we aim to develop a design method for solving the problems mentioned above and also to research on the fundamental evaluation method for this design method.
First, we will think about researching the informations that are needed to realize the deep connection that is made in the sympathetic embodied awareness, between remote locations. In a hand-contact improvisation, it is known that in a body that is creating expressions, the movement of the whole body that is nearly unconscious comes before the hand movement. So we developed a system that realizes the situation of hand-contact improvisation, between remote locations, and to communicate the information of the movement made from the whole body to each other.
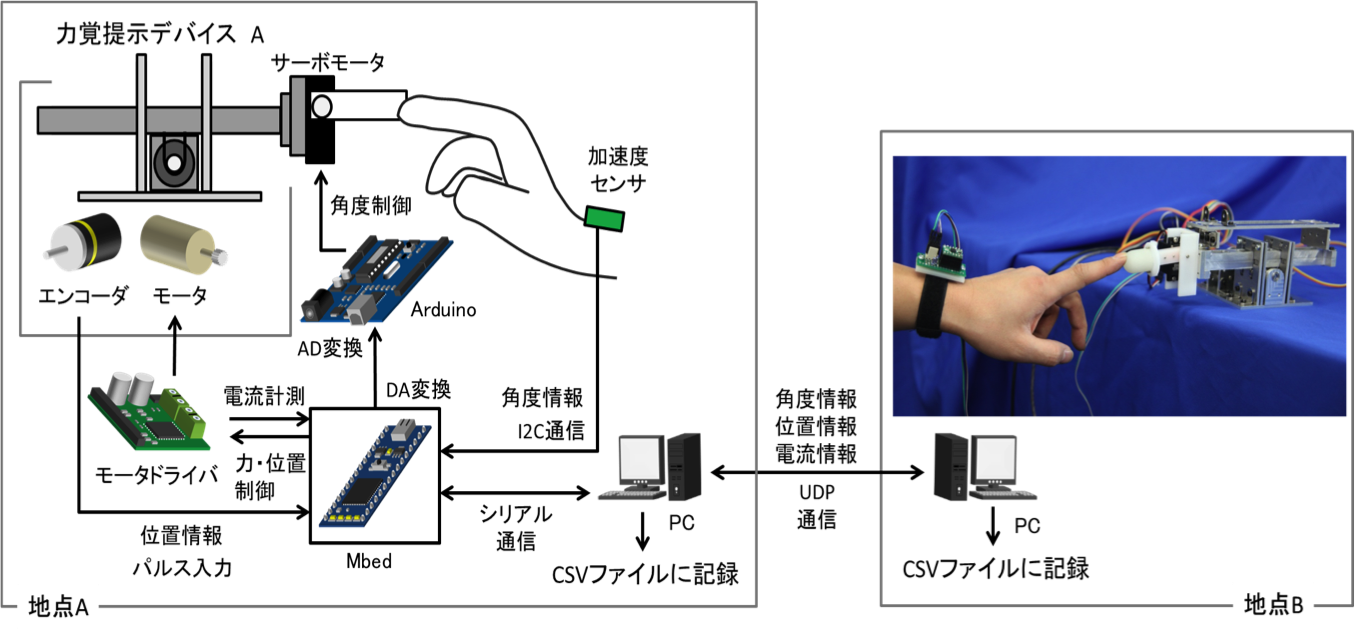
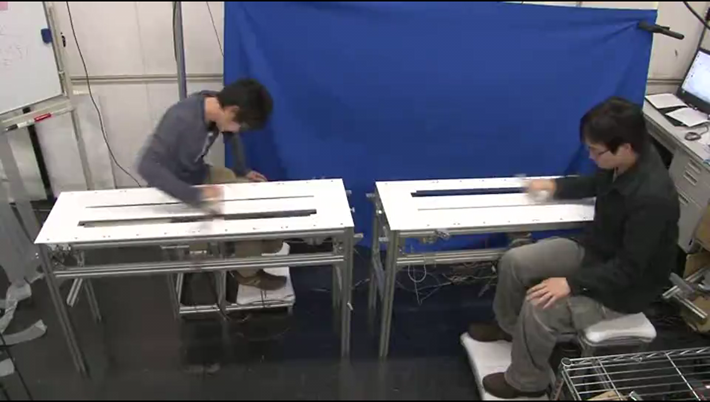
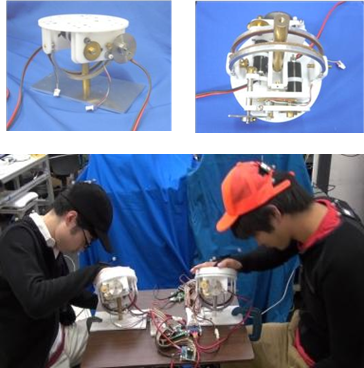
The developed machine is shown in the image below. The grips that moves on the linear guide rail is controlled by the tension of the wire that is made from the motor. The informations of the grip is captured by force and position sensors. We have succeeded in synchronizing the position and the force between remote grips by sending the information from one machine to the other. We are also measuring the center of floor reaction force with the load cells as the movement of the whole body.
By doing a hand-contact improvisation between remote locations using this machine, there was comments saying that it was harder comparing to the times when they were doing the improvisation face to face. To generate a subconscious connection with the other, we have used the information of the body, which is measured from the center of the floor reaction force to grips of each other. By doing this, we have comments that suggests that they could feel the body of the others. From this finding, we are thinking of the possibility of generation of deep connections between remote locations by presenting the bodily information to each other, and by using this method to a system and seeing the results, we are aiming to support communication to become more smooth.
>>このページのトップに戻る
Support for Hand-contact Improvisation Between Remote Locations With the Use of Small Device
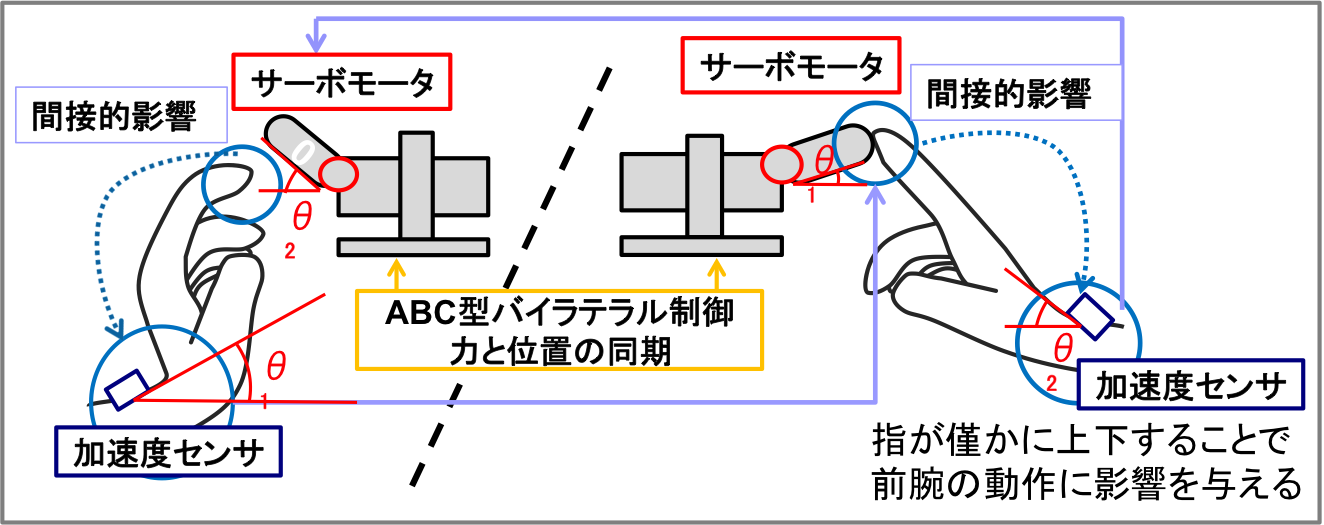
We aimed to realize the co-creative expression between people in remote locations, and developed a small device that communicates the expressive movement, that is made with the whole body, through the movement of the hand to each other.
>>このページのトップに戻る
Development of Creative Interface With the Finger-contact Improvisation
It is confirmed that even with a single finger contact improvisational embodied expression, a deep connection emerges with others just like with the hand contact improvisations. In the interaction of compact movements like the finger contact improvisation, if the creation of this co-creative expression can be supported between remote locations, there is a possibility of realizing a co-creative expression anywhere through a mobile device. So in this study, we researched on the method to support the finger contact improvisation between remote locations, and develop the system to realize it.